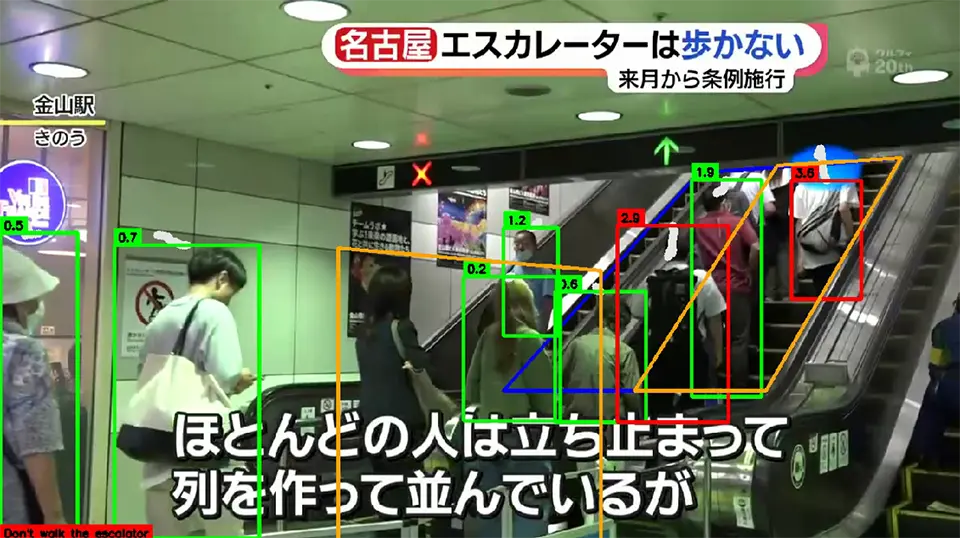
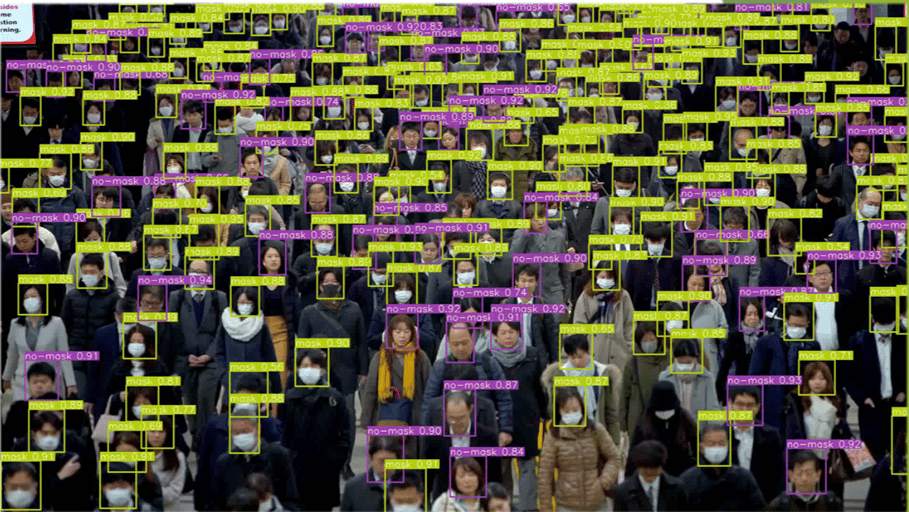
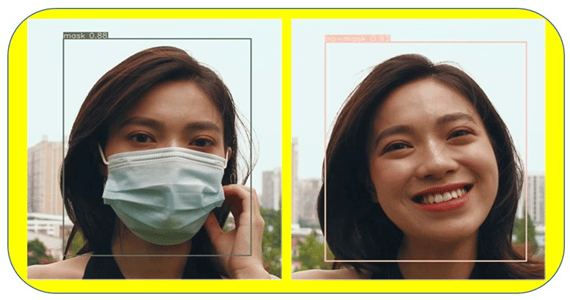
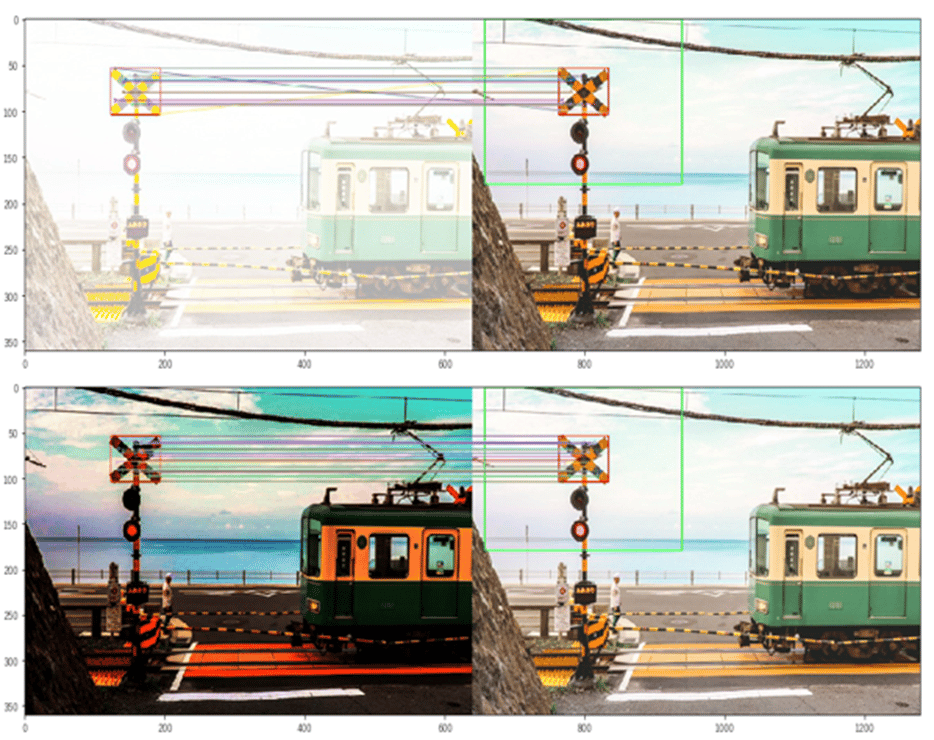
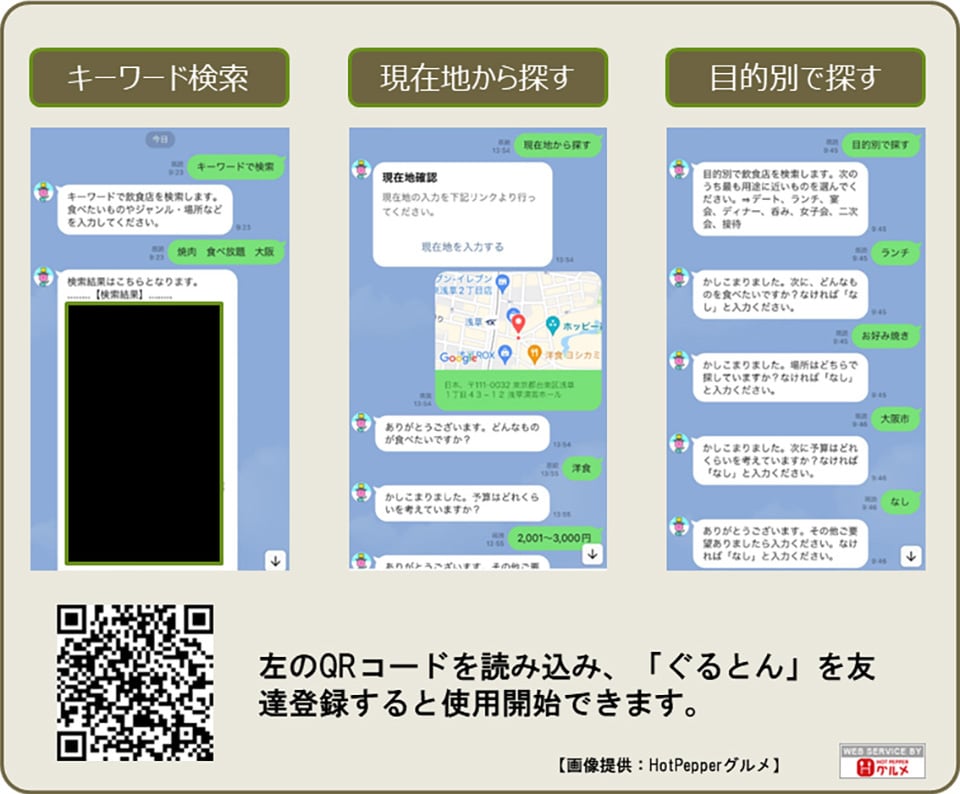
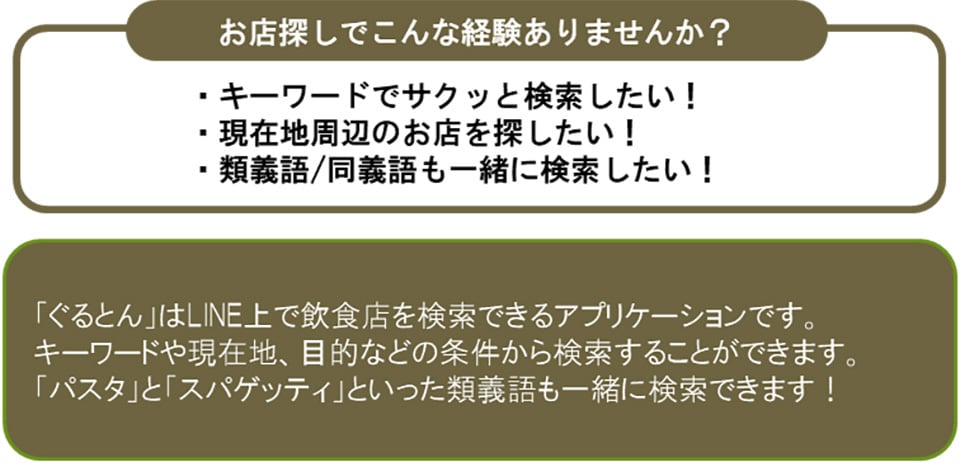
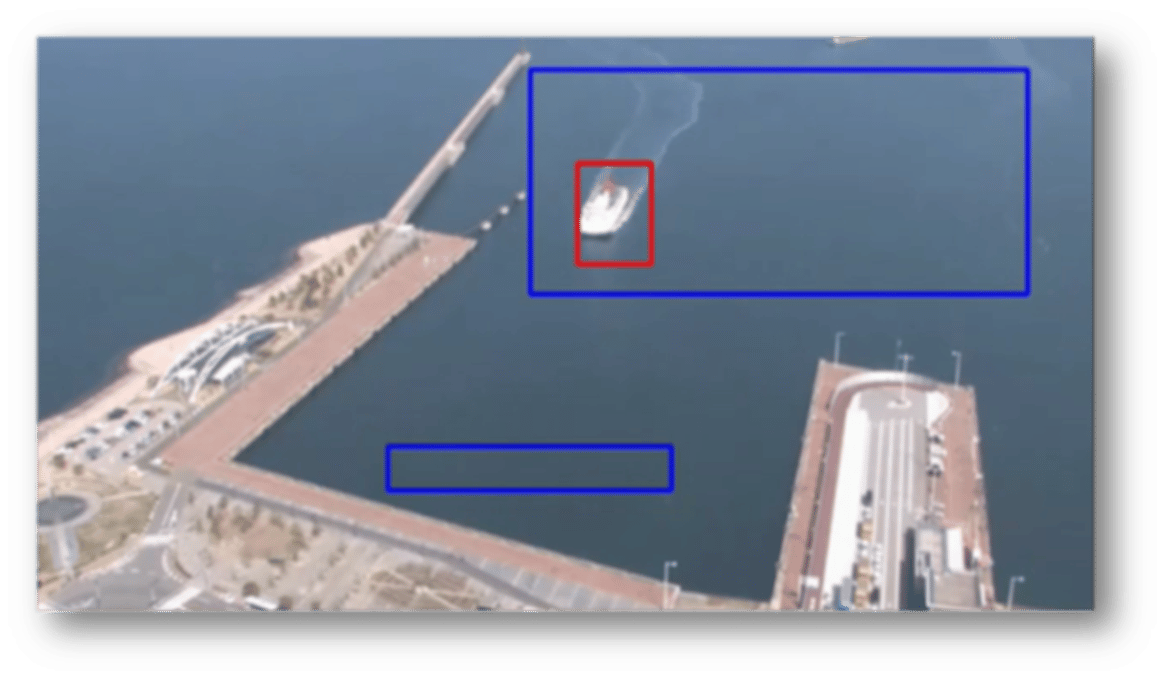
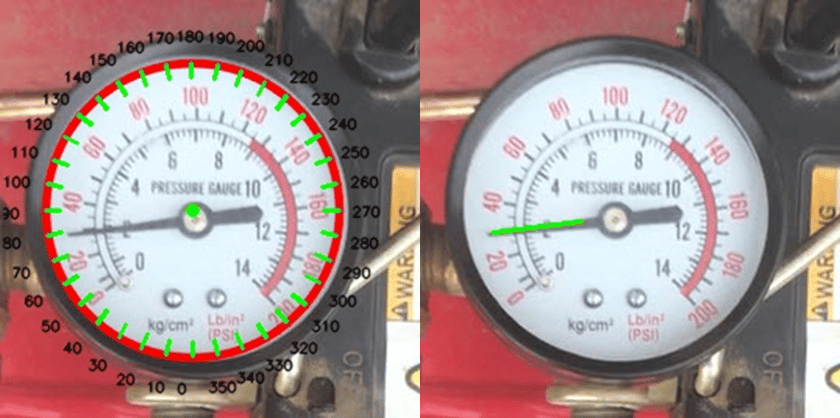
開発実績 PROTOTYPE コミュニケーションロボット「Sota(ソータ)」 Communication robot "Sota" 詳しくはこちらをご覧ください エスカレーター歩行者検知 Escalator pedestrian detection 監視カメラ画像よりエスカレーターを方向した人を検知できます。・エスカレーターを歩行された場合に警報を出力する。・エスカレーターの速度と人移動速度を比較することで歩行者を検知する。 詳しくはこちらをご覧ください マスク検出 Mask detection NIKKEIデジタルの記事 詳しくはこちらをご覧ください 高所作業での危険検知 Danger detection when working at heights 危険エリア(マルチホーン、アークホーン)高所で作業されている方の安全を監視する。・作業員を検知して、設定された危険領域内に入れば、警告を出力する。・下に設置した監視カメラ画像より作業員を検知して、危険領域内に入れば、作業員のスマートフォンに警告音を鳴らす。 詳しくはこちらをご覧ください 画角ズレ検知システム Angle of view deviation detection 複数枚の画像を比較することで、画像の差分を検出することができます。 ■製品のキズ検知■防犯カメラの画角ズレ検知 詳しくはこちらをご覧ください 最上部のネジの検出 Top screw detection 大量のねじ山の中から最上部にあるねじを検出して重心位置を求める。・大量のねじ山の中から最上部にあるねじを検出して重心位置を求めることでアームロボットがねじを一本ずつ摘まみ上げることが可能となる。・ねじの種類が異なっていても検出が可能である。 詳しくはこちらをご覧ください 視覚障害者(白杖)検知 Visually impaired detection 視覚障害者を早期に発見することで、駅ホームでの転落防止や危険予知として活躍できる。 詳しくはこちらをご覧ください リモートワーク健康診断 Remote work health check リモートワーク中の社員の健康管理は難しい。 WEB会議に映る社員の顔で健康度合を判断して健康管理に役立たせることが可能となる。 詳しくはこちらをご覧ください 点群情報 差分検出 Point cloud information 異なる点群データ同士のズレを補正するために、ICP(Iterative Closest Point)という手法を用いて、点群データのズレを補正して、差分を検出する。 差分部分を色付けすることで差分部分が明確化され視覚的に判断ができる。 詳しくはこちらをご覧ください 姿勢推定 Posture estimation 【「姿勢推定」とは?】 ・動画や静止画からリアルタイムに人間の関節点・特徴点を捉え、人間の姿勢を推定する技術 ・各人物ごとに関節点・特徴点の座標情報を得られる 詳しくはこちらをご覧ください 自然言語処理-データサイエンス- Natural language processing 【こんな課題を抱えていませんか?】 ・問い合わせ対応コストを減らしたい ・潜在顧客を増やしたい ▼ 対話ロボットサービスで解決! 詳しくはこちらをご覧ください LINEボットシステム LINE bot 詳しくはこちらをご覧ください AI × 侵入検知 AI × Intrusion detection 指定エリア内に侵入した移動物体検知・移動物体の大きさ等を指定・登録済に移動物体は許可 詳しくはこちらをご覧ください メータ読取方法アナログ→デジタル Meter reading method AI技術でメータを検出して、角度を設定し針の位置を検出することで値を読み取ることが可能になります。 これをIoT技術と組み合わせることで、遠隔でメータ値を読取ことが可能になります。 詳しくはこちらをご覧ください 踏切検知 Railroad crossing detection AIで踏切を検出することで、運転手の注意喚起に繋がる技術であり、今後踏切以外も検出することも検討している。 この技術で動画から踏切部分のみを取り出すことも可能となる。 詳しくはこちらをご覧ください デジタルカメラ三次元計測システム PIXXIS PIXXIS 【PIXXISとは】PIXXISは市販のデジタルカメラで複数の方向から撮影した構造物の、三次元座標を求める計測システムです。計測位置にマーク(シールターゲット)を貼付け撮影を行うと、複数写真上の同一点を自動認識するので、写真上でそれぞれの計測位置を指定する作業は不要です。写真同士をつなぎ合わせるためにコードターゲットを使用します。コードターゲットは5x5の配列で1枚1枚パターンが異なります。 詳しくはこちらをご覧ください