・異なる点群データ同士のズレを補正するために、ICP(Iterative Closest Point)という手法を用いて、点群データのズレを補正する。
・点群データおいて、距離Lが閾値 よりも大きい場合は、その点は差分点群データとする。
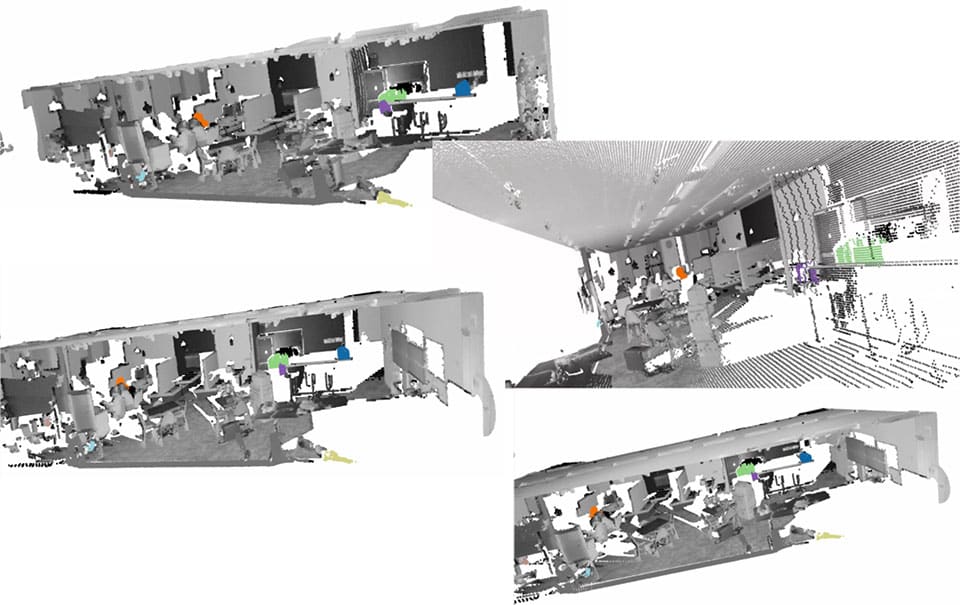
様々な角度から差分検出することで一方向からでは分からない差分を検出



・異なる点群データ同士のズレを補正するために、ICP(Iterative Closest Point)という手法を用いて、点群データのズレを補正する。
・点群データおいて、距離Lが閾値 よりも大きい場合は、その点は差分点群データとする。
